
ニューラルネットワークで四足歩行ロボットを制御する
電子工学科
人間や動物の歩行、水泳、飛行などのリズム的な運動は、脳からではなく、CPGにより発生、制御をしてます。CPG (Central Pattern Generator) は、人間や動物の脊柱における神経回路(ニューラルネットワーク)です。このCPG の機能をロボットに応用することで、不整地に対し、自律的に適応するロボットが作成可能であると考えられます。そこで、我々は人工知能を持つ四足歩行ロボットを開発するため、CPGの電子回路化の研究を行っています。
下の写真は、CPGモデルを用いた四足ロボットの一例です。CPGモデルから生成した信号でロボットの各足を制御します。更に、足裏の感圧センサーの並列処理により、ロボットを不整地に対し自律的に適応させます。
我々は、不整地に対し、自律的に適応する人工知能を持つ四足歩行ロボットの構築を目指して研究を進めています。
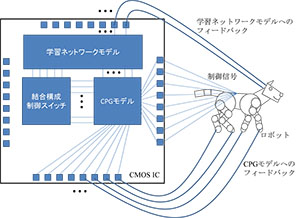
想定しているCPGモデルを用いたロボット制御
-

- 佐伯 勝敏
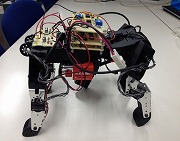 歩行制御回路を実装した四足歩行ロボット
歩行制御回路を実装した四足歩行ロボット