担当講師:入江 寿弘
世の中では二足歩行ロボットは大企業だけでなく一般の人でも楽しめる時代になってきました。
でもそれらの歩行ロボットは本当に人や動物と同じ様に歩いているのでしょうか?
現在の歩行ロボットのほとんどは,取り扱いが容易な電気を使ったモータで動かしています。
この様なモータは歯車を使って減速しなければ力が出ないので必ず歯車を使っています。
しかし,歯車を使うと大きな力は出ますが硬い動きしかできません。つまり,ロボットはガチガチに固まった状態で歩いているのです。
では,人はどうでしょうか?あなたは歩いている時にどれぐらい力を入れていますか?
人が歩くときは必要な筋肉に力を入れれば,あとの筋肉はリラックスしていても歩けます。
着地の衝撃も筋肉がバネとして働く事により,うまく吸収して次の一歩の前進に役立てています。
ロボットにこの様な動作をさせることは出来ないのでしょうか?
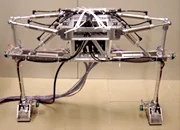
私たちはロボットの筋肉に空気圧シリンダーを使って柔らかな歩行を行わせる研究をしています。
ロボットの形は三脚や二脚など人と違う形をしていますが,歩行を行わせる思想は人や動物から学んでいます。
これらの研究の一端を解りやすく紹介します。